28.1.1999 Mikko Kokkonen
>> coeffmat(4)
ans =
Columns 1 through 12
4 -1 0 0 -1 0 0 0 0 0 0 0
-1 4 -1 0 0 -1 0 0 0 0 0 0
0 -1 4 -1 0 0 -1 0 0 0 0 0
0 0 -1 4 0 0 0 -1 0 0 0 0
-1 0 0 0 4 -1 0 0 -1 0 0 0
0 -1 0 0 -1 4 -1 0 0 -1 0 0
0 0 -1 0 0 -1 4 -1 0 0 -1 0
0 0 0 -1 0 0 -1 4 0 0 0 -1
0 0 0 0 -1 0 0 0 4 -1 0 0
0 0 0 0 0 -1 0 0 -1 4 -1 0
0 0 0 0 0 0 -1 0 0 -1 4 -1
0 0 0 0 0 0 0 -1 0 0 -1 4
0 0 0 0 0 0 0 0 -1 0 0 0
0 0 0 0 0 0 0 0 0 -1 0 0
0 0 0 0 0 0 0 0 0 0 -1 0
0 0 0 0 0 0 0 0 0 0 0 -1
Columns 13 through 16
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
-1 0 0 0
0 -1 0 0
0 0 -1 0
0 0 0 -1
4 -1 0 0
-1 4 -1 0
0 -1 4 -1
0 0 -1 4
>> A = coeffmat(4);
>> b = rhsmat([0,0,0,0], [20,40,60,80], [50,20,10,0], [20,40,60,80])
b =
20
0
0
20
40
0
0
40
60
0
0
60
130
20
10
80
>> s = A \ b;
>> s = reshape(s, 4, 4)';
>> S = [(s(1,1) + 20 + 0)/3 0 0 0 0 (s(1,4) + 20 + 0)/3; ...
[20; 40; 60; 80] s [20; 40; 60; 80]; ...
(s(4,1) + 80 + 50)/3 50 20 10 0 (s(4,4) + 80 + 0)/3]
S =
12.1798 0 0 0 0 12.0374
20.0000 16.5394 14.2682 14.0273 16.1121 20.0000
40.0000 31.8894 26.5061 25.7288 30.4212 40.0000
60.0000 44.5121 34.1379 31.9606 39.8439 60.0000
80.0000 52.0212 33.5727 28.1318 36.9939 80.0000
60.6737 50.0000 20.0000 10.0000 0 38.9980
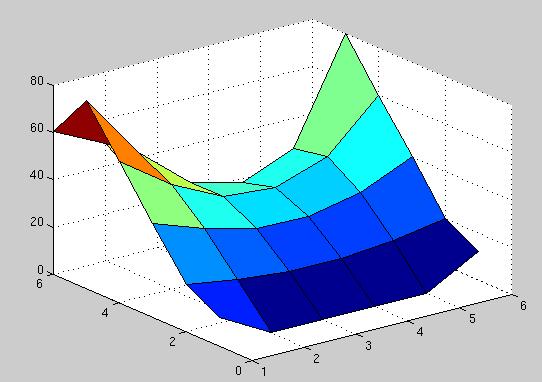
>> surf(S)
>> for j=1:10; view(-20, 10*j); pause; end
>> diary off
Here is the surface plot of the solution:
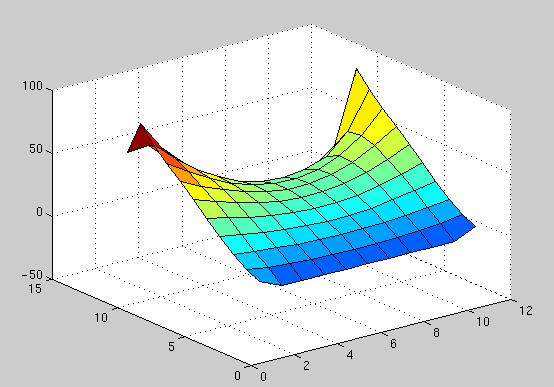
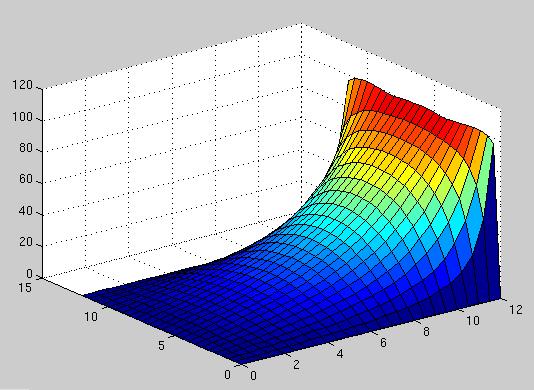
>> pdeg = 4; >> pbot = polyfit([1 2 3 4], [0 0 0 0], pdeg); >> pright = polyfit([1 2 3 4], [20 40 60 80], pdeg); >> ptop = polyfit([1 2 3 4], [50 20 10 0], pdeg); >> pleft = polyfit([1 2 3 4], [20 40 60 80], pdeg); >> ix = 0.5:0.5:4.5; >> itp_bot = polyval(pbot, ix); >> itp_right = polyval(pright, ix); >> itp_top = polyval(ptop, ix); >> itp_left = polyval(pleft, ix); >> s = lapsolve1(itp_bot, itp_right, itp_top, itp_left); >> surf(s)
The solution obtained with interpolated boundary values is shown below:
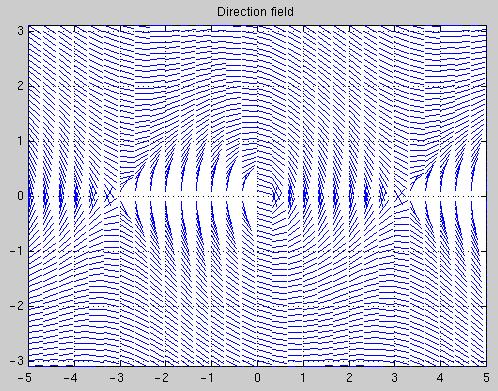
Formulation as a 2-by-2 first-order differential equation system:
y = [ y_1 y_2 ]^T = [ theta theta' ]^T y' = [ y_1' y_2' ]^T = [ y_2 -c y_2 - k sin y_1 ]^T
Critical points are the solutions of the equation y' = 0
This implies that y_2 = 0 and -c y_2 - k sin y_1 = 0 <=> sin y_1 = 0 <=> y_1 = n pi
Critical point (0,0): sin y_1 is linearized using the Taylor series:
sin x = x - x^3/3! + ... approx x
Linearized equation
y' = [ y_2 -c y_2 - k y_1 ]^T
[ 0 1 ] [ y_1 ]
= [ ] [ ]
[ -k -c ] [ y_2 ]
Eigenvalues of A are obtained from the equation det(A - m I) = 0 which yields
-m (-c - m) + k = 0 <=> m^2 + c m + k = 0 <=> m_1,2 = (-c +/- sqrt( c^2 - 4k )) / 2Eigenvectors x satistfy the equation Ax = mx <=> (A - mI) x = 0. The equations in the system are dependent and one of the components can be freely chosen. If x_1 is chosen to be 1, then the first equation gives x_2 = m. The eiqenvectors are [1 m_1]^T and [1 m_2]^T.
The classification of a critical point requires the computation of the following quantities:
p = a_11 + a_22 = -c ( <= 0 ) q = det A = k ( >= 0 ) Delta = p^2 - 4k = c^2 - 4k
(0,0) is stable (p <= 0) and attractive if c<0. The type is
Critical point (pi, 0): The change of variables is required to bring (pi, 0) to origin:
z_1 = y_1 - pi z_2 = y_2
The diff. equation system is transformed to the form:
z' = y' = [ y_2 -c y_2 - k sin y_1 ]^T = [z_2 -c z_2 - k sin (z_1 + pi)]^T = [z_2 -c z_2 + k sin z_1 ]^T
Linearizing the sin z_1 term gives:
y' = [ y_2 -c y_2 + k y_1 ]^T
[ 0 1 ] [ y_1 ]
= [ ] [ ]
[ k -c ] [ y_2 ]
Eigenvalues are now m_1,2 = (-c +/- sqrt( c^2 + 4k )) / 2 and eigenvectors are [1 m_1]^T and [1 m_2]^T.
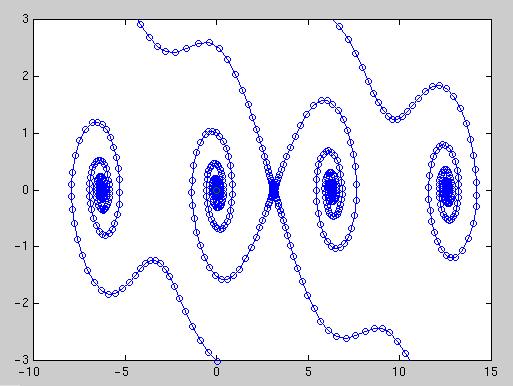
Type of (pi, 0) is always saddle, because roots are always real and of opposite sign and (pi, 0) is unstable, because q = det A = -k < 0.
The rest of the critical points are classified as (0,0) or (pi,0) because of periodicity of sin x.
Phaseplane with c=0.25 and k=1
Phaseplane with c=0.5 and k=1
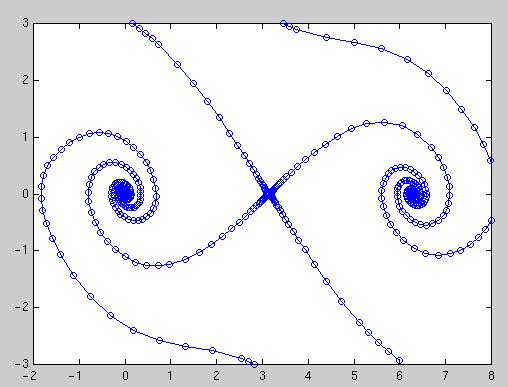
The output from the script is shown below: